НВ-ПБ — различия между версиями
Darkden (обсуждение | вклад) м (робот косметические изменения) |
UEMJ (обсуждение | вклад) |
||
| (не показано 11 промежуточных версий 2 участников) | |||
| Строка 1: | Строка 1: | ||
Навигационно-посадочный вычислитель самолёта [[Ил-62]] предназначен для определения текущих [[системы координат|координат]] Местоположения самолёта и выполнения совместно со схемой автоматического управления автоматического или полуавтоматического полёта по маршруту и в районе аэродрома посадки. | Навигационно-посадочный вычислитель самолёта [[Ил-62]] предназначен для определения текущих [[системы координат|координат]] Местоположения самолёта и выполнения совместно со схемой автоматического управления автоматического или полуавтоматического полёта по маршруту и в районе аэродрома посадки. | ||
| − | В комплект НВ-ПБ входят: | + | В комплект НВ-ПБ входят: [[Файл:Il62Moutput4.jpg|400px|thumb|rigth|Размещение блоков НВ-ПБ на рабочем месте штурмана Ил-62М (Нажать для увеличения)]] |
| − | * Индикаторы-задатчики текущих счисленных координат Xс,Yс(в системе [[ГО | + | * Индикаторы-задатчики текущих счисленных координат Xс, Yс (в системе [[ГО]]) - блоки П-2-3, П-3-3. |
| − | * Индикаторы-задатчики координат [[ППМ]] | + | * Индикаторы-задатчики координат [[ППМ]] Xп,Yп(в системе [[ГО]]) Zп, Sп (в системе [[ЧО]]) - блоки П-4-4, П-5-4. |
| − | * Индикаторы-задатчики координат радиосредств коррекции Xр,Yр(в системе [[ГО]]) - блоки П-6-3, П-7-3. | + | * Индикаторы-задатчики координат радиосредств коррекции Xр, Yр(в системе [[ГО]]) и Zp, Sp (в системе [[ЧО]]) - блоки П-6-3, П-7-3. |
| − | * | + | * Индикатор-задатчик [[ИЗПУ]] - блоки П-9-1. |
| − | * Индикатор-повторитель координат ППМ Zп,Sп (в системе [[ЧО]]) - блок П-33-4. | + | * Индикатор-задатчик [[ОЗПУ]] - блок П-12-3. |
| − | * Индикатор поправок - блок П-10-4. | + | * Индикатор-повторитель координат [[ППМ]] Zп,Sп (в системе [[ЧО]]) - блок П-33-4. |
| + | * Индикатор поправок к счисленным координатам - блок П-10-4. | ||
* Блок импульсного счисления координат П-17-2. | * Блок импульсного счисления координат П-17-2. | ||
* Блок раскладки скоростей П-30-3. | * Блок раскладки скоростей П-30-3. | ||
| − | * Блок программы маршрута и | + | * Блок программы посадки и маршрута (БПП и М) - П-31-4. |
* Щиток управления штурмана - блок П-14-4. | * Щиток управления штурмана - блок П-14-4. | ||
| − | * | + | * Индикатор-задатчик ветра НВ-2П. |
| − | * Другое оборудование. | + | * Другое оборудование (блоки раскладки скоростей, усилителей коррекции, счисления и преобразования, распределительная коробка и т.п.). |
| − | Навигационный вычислитель НВ-ПБ представляет собой | + | |
| − | * автоматически непрерывно определяет методом счисления пути текущие координаты самолёта в частной или главной | + | Навигационный вычислитель НВ-ПБ представляет собой цифро-аналоговое счётно-решающее устройство, которое решает следующие задачи: |
| − | * преобразовывает счисленные координаты самолёта из одной прямоугольной | + | * автоматически непрерывно определяет методом счисления пути текущие координаты самолёта в частной или главной [[ортодромия|ортодромии]] в прямоугольной системе координат]]; |
| + | * преобразовывает счисленные координаты самолёта из одной прямоугольной системы координат в другую; [[Файл:NVPB.jpg|400px|thumb|rigth|Графическое решение трёх задач НВ-ПБ (Нажать для увеличения)]] | ||
* корректирует автоматически вычисленные координаты самолёта по данным радиотехнических средств ближней навигации ([[РСБН]], [[VOR]]/[[DME]]) и посадки ([[КГС]], [[ILS]]); | * корректирует автоматически вычисленные координаты самолёта по данным радиотехнических средств ближней навигации ([[РСБН]], [[VOR]]/[[DME]]) и посадки ([[КГС]], [[ILS]]); | ||
* корректирует полуавтоматически вычисленные координаты местоположения самолёта по данным [[РЛС]]; | * корректирует полуавтоматически вычисленные координаты местоположения самолёта по данным [[РЛС]]; | ||
| Строка 31: | Строка 33: | ||
* коррекция; | * коррекция; | ||
* заход на посадку. | * заход на посадку. | ||
| + | |||
| + | Метод счисления пути основан на интегрировании оставляющих путевой скорости в главноортодромической либо частноортодромической системе координат. Выбор системы определяет штурман (переключателем "ГО-ЧО" на пульте управленияП-14). Уравнения счисления координат имеют следующий вид: | ||
| + | * для главной ортодромии:[[Файл:mgo.jpg|400px|center]] | ||
| + | * для частной ортодромии:[[Файл:mcho.jpg|400px|center]] | ||
| + | |||
| + | С целью повышения надежности работы НВ решение уравнений счисления пути производится двумя методами: импульсным (дискретным) и аналоговым. Оба метода используют в качестве исходных данных информацию от [[ДИСС]]-013. Основным является импульсный режим счисления, как наиболее точный. Аналоговый режим является резервным. По характеру информации, поступающей в НВ, существуют три режима аналогового счисления: | ||
| + | * 1) основной режим (режим "Счисление НВ по ДИСС"); | ||
| + | * 2) режим "Память" по запомненным параметрам ветра U и δ (режим ДИСС-013 "Счисление НВ по СВС" или отказ ДИСС-013); | ||
| + | * 3) режим "Память" по введенным вручную параметрам ветра (режим ДИСС-013 "Счисление НВ по СВС" или отказ ДИСС-013). | ||
| + | В основном режиме аналогового счисления информация о W и [[УС]] поступает в НВ в виде напряжений постоянного тока. НВ формирует сигналы, пропорциональные составляющим WS и WZ (Wу и Wх), и интегрирует их во времени. Одновременно в схеме навигационного треугольника скоростей (W, Vист и U) формируются сигналы напряжений, пропорциональные составляющим ветра U и δ в выбранной системе координат (ЧО или ГО). | ||
| + | В режиме 2 информация W и УС от ДИСС отсутствует, но W и УС формируются по данным Vист (от СВС-ПН-15) и последним "запомненным" параметрам ветра U и δ. Непрерывное счисление текущих координат ВС продолжается. | ||
| + | В режиме 3 счисление координат ВС осуществляется так же, как и в режиме 2, однако при продолжительном режиме штурман обязан на маршруте оперативно вводить в НВ параметры U и δ, соответствующие действительным, с целью повышения точности счисления. | ||
| + | |||
| + | |||
| + | |||
| + | == Ссылки == | ||
| + | * Обсуждение на форуме - [http://www.avsim.su/forum/topic/28792-nv-pb/ НВ-ПБ] | ||
| + | * Обсуждение на форуме - [http://www.avsim.su/forum/topic/109972-go-v-nv-pb/ ГО в НВ-ПБ] | ||
== См. также == | == См. также == | ||
Текущая версия на 17:58, 20 января 2014
Навигационно-посадочный вычислитель самолёта Ил-62 предназначен для определения текущих координат Местоположения самолёта и выполнения совместно со схемой автоматического управления автоматического или полуавтоматического полёта по маршруту и в районе аэродрома посадки.
В комплект НВ-ПБ входят:

- Индикаторы-задатчики текущих счисленных координат Xс, Yс (в системе ГО) - блоки П-2-3, П-3-3.
- Индикаторы-задатчики координат ППМ Xп,Yп(в системе ГО) Zп, Sп (в системе ЧО) - блоки П-4-4, П-5-4.
- Индикаторы-задатчики координат радиосредств коррекции Xр, Yр(в системе ГО) и Zp, Sp (в системе ЧО) - блоки П-6-3, П-7-3.
- Индикатор-задатчик ИЗПУ - блоки П-9-1.
- Индикатор-задатчик ОЗПУ - блок П-12-3.
- Индикатор-повторитель координат ППМ Zп,Sп (в системе ЧО) - блок П-33-4.
- Индикатор поправок к счисленным координатам - блок П-10-4.
- Блок импульсного счисления координат П-17-2.
- Блок раскладки скоростей П-30-3.
- Блок программы посадки и маршрута (БПП и М) - П-31-4.
- Щиток управления штурмана - блок П-14-4.
- Индикатор-задатчик ветра НВ-2П.
- Другое оборудование (блоки раскладки скоростей, усилителей коррекции, счисления и преобразования, распределительная коробка и т.п.).
Навигационный вычислитель НВ-ПБ представляет собой цифро-аналоговое счётно-решающее устройство, которое решает следующие задачи:
- автоматически непрерывно определяет методом счисления пути текущие координаты самолёта в частной или главной ортодромии в прямоугольной системе координат]];
- преобразовывает счисленные координаты самолёта из одной прямоугольной системы координат в другую;
- корректирует автоматически вычисленные координаты самолёта по данным радиотехнических средств ближней навигации (РСБН, VOR/DME) и посадки (КГС, ILS);
- корректирует полуавтоматически вычисленные координаты местоположения самолёта по данным РЛС;
- корректирует автоматически БУ по данным аппаратуры Курс-МП;
- расшифровывает (определяет координаты местоположения) неопознанные радиолокационные ориентиры, видимые на экране РЛС);
- программирует заход на посадку (предпосадочный маневр);
- вырабатывает управляющие сигналы в систему автоматического управления в режимах полёта по маршруту и предпосадочного маневра;
- обеспечивает полёт по кратчайшему расстоянию (КР);
- определяет и указывает величину и направление скорости ветра.

НВ-ПБ работает в четырёх режимах:
- счисление пути;
- преобразование координат;
- коррекция;
- заход на посадку.
Метод счисления пути основан на интегрировании оставляющих путевой скорости в главноортодромической либо частноортодромической системе координат. Выбор системы определяет штурман (переключателем "ГО-ЧО" на пульте управленияП-14). Уравнения счисления координат имеют следующий вид:
- для главной ортодромии:
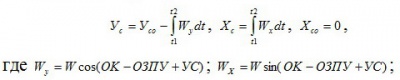
- для частной ортодромии:



С целью повышения надежности работы НВ решение уравнений счисления пути производится двумя методами: импульсным (дискретным) и аналоговым. Оба метода используют в качестве исходных данных информацию от ДИСС-013. Основным является импульсный режим счисления, как наиболее точный. Аналоговый режим является резервным. По характеру информации, поступающей в НВ, существуют три режима аналогового счисления:
- 1) основной режим (режим "Счисление НВ по ДИСС");
- 2) режим "Память" по запомненным параметрам ветра U и δ (режим ДИСС-013 "Счисление НВ по СВС" или отказ ДИСС-013);
- 3) режим "Память" по введенным вручную параметрам ветра (режим ДИСС-013 "Счисление НВ по СВС" или отказ ДИСС-013).
В основном режиме аналогового счисления информация о W и УС поступает в НВ в виде напряжений постоянного тока. НВ формирует сигналы, пропорциональные составляющим WS и WZ (Wу и Wх), и интегрирует их во времени. Одновременно в схеме навигационного треугольника скоростей (W, Vист и U) формируются сигналы напряжений, пропорциональные составляющим ветра U и δ в выбранной системе координат (ЧО или ГО). В режиме 2 информация W и УС от ДИСС отсутствует, но W и УС формируются по данным Vист (от СВС-ПН-15) и последним "запомненным" параметрам ветра U и δ. Непрерывное счисление текущих координат ВС продолжается. В режиме 3 счисление координат ВС осуществляется так же, как и в режиме 2, однако при продолжительном режиме штурман обязан на маршруте оперативно вводить в НВ параметры U и δ, соответствующие действительным, с целью повышения точности счисления.
Ссылки
- Обсуждение на форуме - НВ-ПБ
- Обсуждение на форуме - ГО в НВ-ПБ
См. также
Источники
- Пассажирский самолет Ил-62. Часть II Под общей ред. Г.В.Новожилова. М.:Машиностроение, 1981
| Это незавершённая статья. Вы можете помочь проекту, исправив и дополнив её. |